Notes with Code on Linear Regression
![]()
This notebook provides a brief introduction to linear regression with python implementation, covering all mathematical concepts with detailed explanations, derivations, and working code examples. This mainly used the CS229 Stanford notes as a reference.
Table of Contents
- Introduction to Supervised Learning
- Linear Regression Setup
- Section 1.1: LMS Algorithm (Gradient Descent)
- Section 1.2: Normal Equations
- Section 1.3: Probabilistic Interpretation
# Import all necessary libraries
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
from mpl_toolkits.mplot3d import Axes3D
import seaborn as sns
from scipy import stats
import time
# Set style and random seed for reproducibility
plt.style.use('default')
np.random.seed(42)
# Configure matplotlib for better rendering
plt.rcParams['figure.figsize'] = (10, 6)
plt.rcParams['font.size'] = 12
plt.rcParams['axes.labelsize'] = 14
plt.rcParams['axes.titlesize'] = 16
plt.rcParams['legend.fontsize'] = 12
print("Libraries imported successfully!")
print(f"NumPy version: {np.__version__}")
Libraries imported successfully!
NumPy version: 1.23.5
1. Introduction to Supervised Learning
Let’s start by understanding the fundamental concepts of supervised learning through a concrete example.
1.1 The Housing Price Prediction Problem
Suppose we have a dataset giving the living areas and prices of 47 houses from Portland, Oregon. Our goal is to learn a function that can predict house prices based on their living areas.
Key Terminology:
- Input variables $x^{(i)}$: Also called input features (living area in this example)
- Output variable $y^{(i)}$: Also called target variable (price)
- Training example: A pair $(x^{(i)}, y^{(i)})$
- Training set: Collection of $n$ training examples ${(x^{(i)}, y^{(i)}); i = 1, \ldots, n}$
- Input space $\mathcal{X}$: Space of input values
- Output space $\mathcal{Y}$: Space of output values
Important note: The superscript “$(i)$” is simply an index into the training set and has nothing to do with exponentiation.
# Create the Portland housing dataset from the PDF
# This represents a sample of the 47 houses mentioned
portland_data = {
'living_area': [2104, 1600, 2400, 1416, 3000, 1985, 1534, 1427, 1380, 1494,
1940, 2000, 1890, 4478, 1268, 2300, 1320, 1236, 2609, 3031,
1767, 1888, 1604, 1962, 3890, 1100, 1458, 2526, 2200, 2637],
'price': [400, 330, 369, 232, 540, 315, 285, 250, 245, 259,
302, 320, 295, 715, 210, 355, 223, 199, 499, 599,
252, 290, 262, 320, 765, 170, 240, 490, 345, 500]
}
# Convert to numpy arrays for easier manipulation
living_areas = np.array(portland_data['living_area'])
prices = np.array(portland_data['price'])
n_samples = len(living_areas)
print(f"Dataset: {n_samples} houses from Portland, Oregon")
print(f"Living area range: {living_areas.min()} - {living_areas.max()} sq ft")
print(f"Price range: ${prices.min()}k - ${prices.max()}k")
# Display first few examples
portland_df = pd.DataFrame(portland_data)
print("\nFirst 10 training examples:")
print(portland_df.head(10))
Dataset: 30 houses from Portland, Oregon
Living area range: 1100 - 4478 sq ft
Price range: $170k - $765k
First 10 training examples:
living_area price
0 2104 400
1 1600 330
2 2400 369
3 1416 232
4 3000 540
5 1985 315
6 1534 285
7 1427 250
8 1380 245
9 1494 259
# Plot the housing data as shown in the PDF
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.scatter(living_areas, prices, color='blue', alpha=0.7, s=60)
plt.xlabel('Living Area (square feet)')
plt.ylabel('Price (in $1000s)')
plt.title('Housing Prices vs Living Area')
plt.grid(True, alpha=0.3)
# Add some statistics
plt.subplot(1, 2, 2)
plt.hist(prices, bins=15, alpha=0.7, color='green', edgecolor='black')
plt.xlabel('Price (in $1000s)')
plt.ylabel('Frequency')
plt.title('Distribution of House Prices')
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print(f"Correlation between living area and price: {np.corrcoef(living_areas, prices)[0,1]:.3f}")
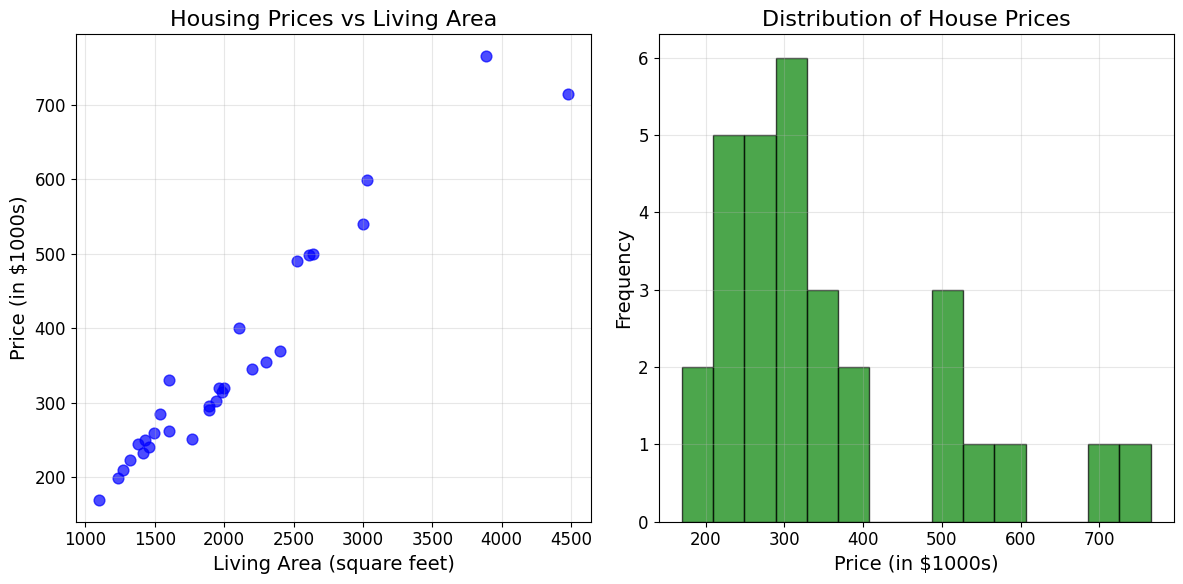
Correlation between living area and price: 0.968
1.2 The Supervised Learning Framework
Goal: Given a training set, learn a function $h : \mathcal{X} \mapsto \mathcal{Y}$ so that $h(x)$ is a “good” predictor for the corresponding value of $y$.
For historical reasons, this function $h$ is called a hypothesis.
The Learning Process:
Training Set → Learning Algorithm → h (hypothesis)
Then: $x$ (living area of house) → $h$ → predicted $y$ (predicted price)
Problem Types:
- Regression Problem: When the target variable is continuous (like house prices)
- Classification Problem: When $y$ takes on discrete values (like house vs. apartment)
# Demonstrate the concept of hypothesis function
# Let's try a simple linear hypothesis as a starting point
def simple_hypothesis(x, theta0=50, theta1=0.15):
"""Simple linear hypothesis: h(x) = theta0 + theta1 * x"""
return theta0 + theta1 * x
# Generate predictions using our simple hypothesis
x_line = np.linspace(living_areas.min(), living_areas.max(), 100)
y_pred_simple = simple_hypothesis(x_line)
plt.figure(figsize=(10, 6))
plt.scatter(living_areas, prices, color='blue', alpha=0.7, s=60, label='Training Data')
plt.plot(x_line, y_pred_simple, 'r-', linewidth=2, label='Simple Hypothesis: h(x) = 50 + 0.15x')
plt.xlabel('Living Area (square feet)')
plt.ylabel('Price (in $1000s)')
plt.title('Supervised Learning: Fitting a Hypothesis to Data')
plt.legend()
plt.grid(True, alpha=0.3)
plt.show()
# Calculate how well our simple hypothesis performs
y_pred_data = simple_hypothesis(living_areas)
error = np.mean((y_pred_data - prices)**2)
print(f"Mean Squared Error of simple hypothesis: {error:.2f}")
print("\nThis shows we need a systematic way to find good parameters!")
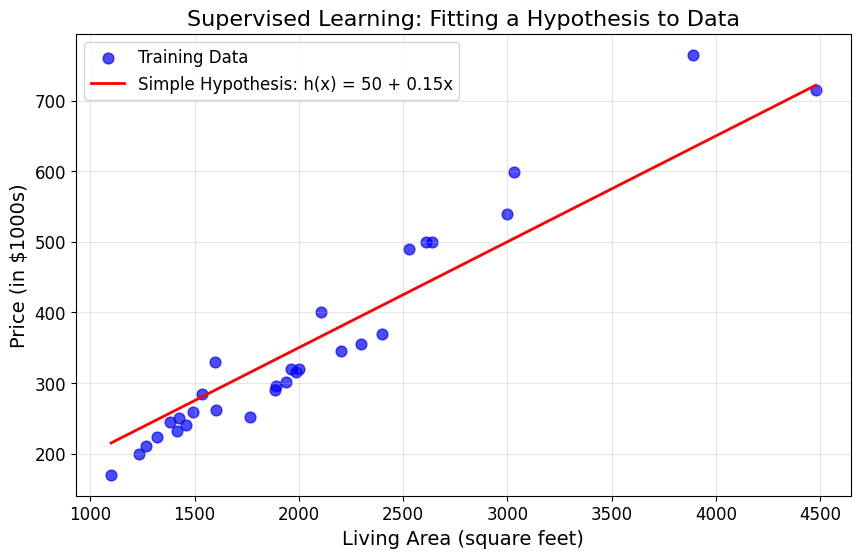
Mean Squared Error of simple hypothesis: 2153.47
This shows we need a systematic way to find good parameters!
2. Chapter 1: Linear Regression
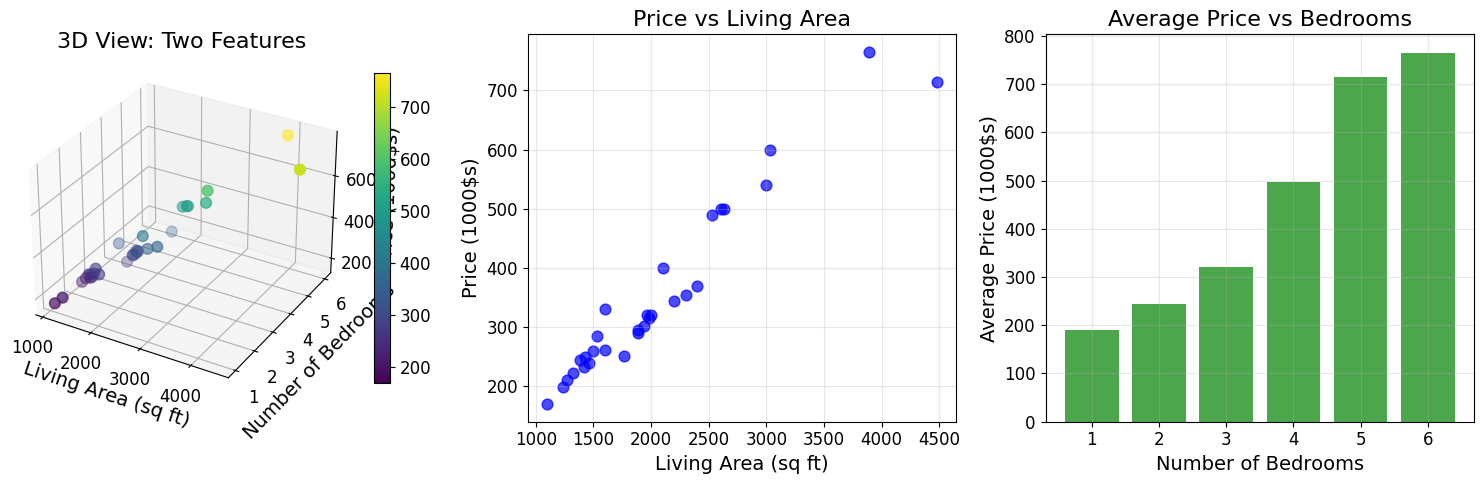
2.1 Extended Dataset with Multiple Features
To make our housing example more interesting, let’s consider a richer dataset that also includes the number of bedrooms in each house.
Now our features are two-dimensional vectors in $\mathbb{R}^2$:
- $x_1^{(i)}$: living area of the $i$-th house
- $x_2^{(i)}$: number of bedrooms of the $i$-th house
# Extend our dataset with number of bedrooms
bedrooms = np.array([3, 3, 3, 2, 4, 3, 2, 2, 2, 2,
3, 3, 3, 5, 1, 4, 2, 2, 4, 4,
3, 3, 2, 3, 6, 1, 2, 4, 3, 4])
# Create extended dataframe
extended_data = pd.DataFrame({
'living_area': living_areas,
'bedrooms': bedrooms,
'price': prices
})
print("Extended Housing Dataset:")
print(extended_data.head(10))
print(f"\nDataset statistics:")
print(extended_data.describe())
Extended Housing Dataset:
living_area bedrooms price
0 2104 3 400
1 1600 3 330
2 2400 3 369
3 1416 2 232
4 3000 4 540
5 1985 3 315
6 1534 2 285
7 1427 2 250
8 1380 2 245
9 1494 2 259
Dataset statistics:
living_area bedrooms price
count 30.000000 30.000000 30.000000
mean 2048.133333 2.933333 352.533333
std 780.668623 1.112107 149.799575
min 1100.000000 1.000000 170.000000
25% 1467.000000 2.000000 250.500000
50% 1915.000000 3.000000 308.500000
75% 2375.000000 3.750000 392.250000
max 4478.000000 6.000000 765.000000
# Visualize the extended dataset
fig = plt.figure(figsize=(15, 5))
# 3D scatter plot
ax1 = fig.add_subplot(131, projection='3d')
scatter = ax1.scatter(living_areas, bedrooms, prices, c=prices, cmap='viridis', s=60)
ax1.set_xlabel('Living Area (sq ft)')
ax1.set_ylabel('Number of Bedrooms')
ax1.set_zlabel('Price (1000$s)')
ax1.set_title('3D View: Two Features')
plt.colorbar(scatter, ax=ax1, shrink=0.8)
# 2D projections
ax2 = fig.add_subplot(132)
ax2.scatter(living_areas, prices, alpha=0.7, s=60, color='blue')
ax2.set_xlabel('Living Area (sq ft)')
ax2.set_ylabel('Price (1000$s)')
ax2.set_title('Price vs Living Area')
ax2.grid(True, alpha=0.3)
ax3 = fig.add_subplot(133)
bedroom_avg = extended_data.groupby('bedrooms')['price'].mean()
ax3.bar(bedroom_avg.index, bedroom_avg.values, alpha=0.7, color='green')
ax3.set_xlabel('Number of Bedrooms')
ax3.set_ylabel('Average Price (1000$s)')
ax3.set_title('Average Price vs Bedrooms')
ax3.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
2.2 Linear Hypothesis Function
To perform supervised learning, we must decide how to represent functions/hypotheses $h$ in a computer. As an initial choice, let’s approximate $y$ as a linear function of $x$:
\[h_\theta(x) = \theta_0 + \theta_1 x_1 + \theta_2 x_2\]Here, the $\theta_i$’s are the parameters (also called weights) that parameterize the space of linear functions mapping from $\mathcal{X}$ to $\mathcal{Y}$.
Vectorized Notation
To simplify notation, we introduce the convention of letting $x_0 = 1$ (the intercept term), so that:
\[h(x) = \sum_{i=0}^{d} \theta_i x_i = \theta^T x\]where:
- $\theta$ and $x$ are both viewed as vectors
- $d$ is the number of input variables (not counting $x_0$)
def linear_hypothesis(X, theta):
"""
Compute linear hypothesis h_theta(x) = theta^T * x
Args:
X: Feature matrix (n_samples, n_features) with intercept term
theta: Parameter vector (n_features,)
Returns:
predictions: h_theta(x) for each sample
"""
return X @ theta
# Create feature matrices with intercept term
# For single feature (living area only)
X_single = np.column_stack([np.ones(n_samples), living_areas])
# For multiple features (living area + bedrooms)
X_multi = np.column_stack([np.ones(n_samples), living_areas, bedrooms])
print("Single feature matrix X (with intercept):")
print(f"Shape: {X_single.shape}")
print("First 5 rows:")
print(X_single[:5])
print("\nMultiple feature matrix X (with intercept):")
print(f"Shape: {X_multi.shape}")
print("First 5 rows:")
print(X_multi[:5])
Single feature matrix X (with intercept):
Shape: (30, 2)
First 5 rows:
[[1.000e+00 2.104e+03]
[1.000e+00 1.600e+03]
[1.000e+00 2.400e+03]
[1.000e+00 1.416e+03]
[1.000e+00 3.000e+03]]
Multiple feature matrix X (with intercept):
Shape: (30, 3)
First 5 rows:
[[1.000e+00 2.104e+03 3.000e+00]
[1.000e+00 1.600e+03 3.000e+00]
[1.000e+00 2.400e+03 3.000e+00]
[1.000e+00 1.416e+03 2.000e+00]
[1.000e+00 3.000e+03 4.000e+00]]
# Example with different parameter values
theta_examples = [
np.array([50, 0.1]), # Single feature
np.array([30, 0.15, 50]) # Multiple features
]
print("Testing different hypothesis functions:")
print("\n1. Single feature model: h(x) = theta_0 + theta_1 * living_area")
theta1 = theta_examples[0]
predictions1 = linear_hypothesis(X_single, theta1)
print(f"Parameters: theta = {theta1}")
print(f"First 5 predictions: {predictions1[:5]}")
print(f"Actual prices: {prices[:5]}")
print("\n2. Multiple feature model: h(x) = theta_0 + theta_1 * living_area + theta_2 * bedrooms")
theta2 = theta_examples[1]
predictions2 = linear_hypothesis(X_multi, theta2)
print(f"Parameters: theta = {theta2}")
print(f"First 5 predictions: {predictions2[:5]}")
print(f"Actual prices: {prices[:5]}")
Testing different hypothesis functions:
1. Single feature model: h(x) = theta_0 + theta_1 * living_area
Parameters: theta = [50. 0.1]
First 5 predictions: [260.4 210. 290. 191.6 350. ]
Actual prices: [400 330 369 232 540]
2. Multiple feature model: h(x) = theta_0 + theta_1 * living_area + theta_2 * bedrooms
Parameters: theta = [30. 0.15 50. ]
First 5 predictions: [495.6 420. 540. 342.4 680. ]
Actual prices: [400 330 369 232 540]
2.3 The Cost Function
Now, given a training set, how do we pick or learn the parameters $\theta$?
One reasonable method is to make $h(x)$ close to $y$, at least for the training examples we have. To formalize this, we define a function that measures how close the $h(x^{(i)})$’s are to the corresponding $y^{(i)}$’s.
We define the cost function:
\[J(\theta) = \frac{1}{2} \sum_{i=1}^{n} \left(h_\theta(x^{(i)}) - y^{(i)}\right)^2\]This is the familiar least-squares cost function that gives rise to the ordinary least squares regression model.
Why This Cost Function?
- Intuitive: Penalizes predictions that are far from actual values
- Differentiable: Allows us to use calculus-based optimization
- Convex: Has a unique global minimum (no local minima)
def cost_function(X, y, theta):
"""
Compute the least squares cost function J(theta)
Args:
X: Feature matrix (n_samples, n_features)
y: Target vector (n_samples,)
theta: Parameter vector (n_features,)
Returns:
cost: J(theta)
"""
m = len(y)
predictions = linear_hypothesis(X, theta)
errors = predictions - y
cost = (1 / (2 * m)) * np.sum(errors ** 2)
return cost
# Calculate costs for our example hypotheses
cost1 = cost_function(X_single, prices, theta_examples[0])
cost2 = cost_function(X_multi, prices, theta_examples[1])
print(f"Cost for single feature model: J(theta) = {cost1:.2f}")
print(f"Cost for multiple feature model: J(theta) = {cost2:.2f}")
print("\nLower cost indicates better fit to training data")
Cost for single feature model: J(theta) = 7627.60
Cost for multiple feature model: J(theta) = 9562.00
Lower cost indicates better fit to training data
# Visualize cost function landscape for single parameter
# Fix theta_0 = 50, vary theta_1
theta1_range = np.linspace(0.05, 0.25, 100)
costs = []
for t1 in theta1_range:
theta_temp = np.array([50, t1])
cost = cost_function(X_single, prices, theta_temp)
costs.append(cost)
plt.figure(figsize=(12, 5))
# Plot cost landscape
plt.subplot(1, 2, 1)
plt.plot(theta1_range, costs, 'b-', linewidth=2)
plt.axvline(theta_examples[0][1], color='red', linestyle='--', alpha=0.7,
label=f'theta_1 = {theta_examples[0][1]}')
plt.xlabel('theta_1 (slope parameter)')
plt.ylabel('Cost J(theta)')
plt.title('Cost Function Landscape')
plt.legend()
plt.grid(True, alpha=0.3)
# Show the effect of parameter choice on fit
plt.subplot(1, 2, 2)
plt.scatter(living_areas, prices, alpha=0.7, s=60, color='blue', label='Training data')
# Show fits with different theta_1 values
x_line = np.linspace(living_areas.min(), living_areas.max(), 100)
for i, t1 in enumerate([0.1, 0.15, 0.2]):
y_line = 50 + t1 * x_line
plt.plot(x_line, y_line, linewidth=2, alpha=0.7,
label=f'theta_1 = {t1}')
plt.xlabel('Living Area (sq ft)')
plt.ylabel('Price (1000$s)')
plt.title('Effect of Parameter Values')
plt.legend()
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# Find the minimum cost and corresponding theta_1
min_idx = np.argmin(costs)
optimal_theta1 = theta1_range[min_idx]
min_cost = costs[min_idx]
print(f"Approximate optimal theta_1: {optimal_theta1:.4f}")
print(f"Minimum cost: {min_cost:.2f}")
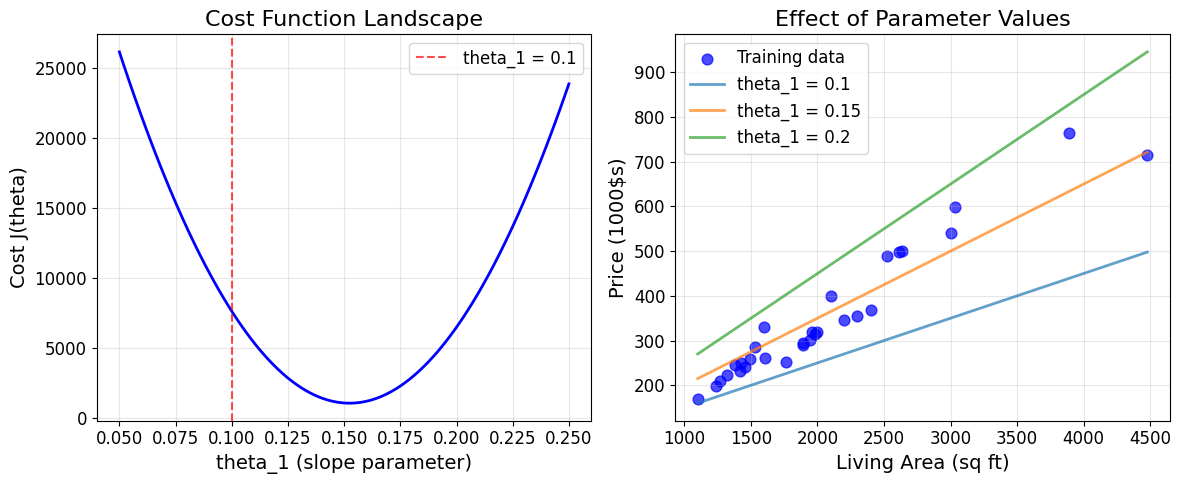
Approximate optimal theta_1: 0.1530
Minimum cost: 1064.10
3. Section 1.1: LMS Algorithm (Gradient Descent)
We want to choose $\theta$ so as to minimize $J(\theta)$. Let’s use a search algorithm that starts with some initial guess for $\theta$, and repeatedly changes $\theta$ to make $J(\theta)$ smaller, until we converge to a value that minimizes $J(\theta)$.
3.1 Gradient Descent Algorithm
The gradient descent algorithm starts with some initial $\theta$, and repeatedly performs the update:
\[\theta_j := \theta_j - \alpha \frac{\partial}{\partial \theta_j} J(\theta)\](This update is simultaneously performed for all values of $j = 0, \ldots, d$.)
Here, $\alpha$ is called the learning rate. This algorithm repeatedly takes a step in the direction of steepest decrease of $J$.
3.2 Deriving the Gradient
To implement this algorithm, we need to work out the partial derivative term. Let’s start with a single training example $(x, y)$:
\[\frac{\partial}{\partial \theta_j} J(\theta) = \frac{\partial}{\partial \theta_j} \frac{1}{2}(h_\theta(x) - y)^2\] \[= (h_\theta(x) - y) \cdot \frac{\partial}{\partial \theta_j} (h_\theta(x) - y)\] \[= (h_\theta(x) - y) \cdot \frac{\partial}{\partial \theta_j} \left(\sum_{i=0}^{d} \theta_i x_i - y\right)\] \[= (h_\theta(x) - y) \cdot x_j\]3.3 LMS Update Rule
For a single training example, this gives us the update rule:
\[\theta_j := \theta_j + \alpha \left(y^{(i)} - h_\theta(x^{(i)})\right) x_j^{(i)}\]This is called the LMS update rule (LMS stands for “least mean squares”), also known as the Widrow-Hoff learning rule.
Intuition Behind LMS Rule:
- Update magnitude is proportional to the error term $(y^{(i)} - h_\theta(x^{(i)}))$
- If prediction is close to actual value → small update
- If prediction has large error → large update
def compute_gradient(X, y, theta):
"""
Compute the gradient of the cost function
Args:
X: Feature matrix (n_samples, n_features)
y: Target vector (n_samples,)
theta: Parameter vector (n_features,)
Returns:
gradient: Gradient vector (n_features,)
"""
m = len(y)
predictions = linear_hypothesis(X, theta)
errors = predictions - y
gradient = (1/m) * X.T @ errors
return gradient
def lms_single_update(x, y, theta, alpha):
"""
LMS update rule for a single training example
Args:
x: Single feature vector (n_features,)
y: Single target value
theta: Current parameter vector (n_features,)
alpha: Learning rate
Returns:
theta_new: Updated parameter vector
"""
prediction = np.dot(theta, x)
error = y - prediction
theta_new = theta + alpha * error * x
return theta_new
# Demonstrate single LMS update
print("LMS Update Rule Demonstration")
print("=" * 40)
# Start with some parameters
theta_init = np.array([50, 0.1])
alpha = 0.0001 # Small learning rate for stability
# Use first training example
x_example = X_single[0] # [1, 2104]
y_example = prices[0] # 400
print(f"Initial parameters: theta = {theta_init}")
print(f"Training example: x = {x_example}, y = {y_example}")
# Make prediction
pred_before = np.dot(theta_init, x_example)
error_before = y_example - pred_before
print(f"Prediction before update: {pred_before:.1f}")
print(f"Error: {error_before:.1f}")
# Apply LMS update
theta_updated = lms_single_update(x_example, y_example, theta_init, alpha)
pred_after = np.dot(theta_updated, x_example)
print(f"\nUpdated parameters: theta = {theta_updated}")
print(f"Prediction after update: {pred_after:.1f}")
print(f"Improvement in prediction: {abs(error_before) - abs(y_example - pred_after):.1f}")
LMS Update Rule Demonstration
========================================
Initial parameters: theta = [50. 0.1]
Training example: x = [1.000e+00 2.104e+03], y = 400
Prediction before update: 260.4
Error: 139.6
Updated parameters: theta = [50.01396 29.47184]
Prediction after update: 62058.8
Improvement in prediction: -61519.2
3.4 Batch Gradient Descent
For a training set with more than one example, we modify the method as follows:
Repeat until convergence: \(\theta_j := \theta_j + \alpha \sum_{i=1}^{n} \left(y^{(i)} - h_\theta(x^{(i)})\right) x_j^{(i)} \quad \text{(for every } j\text{)}\)
In vector form: \(\theta := \theta + \alpha \sum_{i=1}^{n} \left(y^{(i)} - h_\theta(x^{(i)})\right) x^{(i)}\)
The quantity in the summation is just $\frac{\partial J(\theta)}{\partial \theta_j}$, so this is simply gradient descent on the original cost function $J$.
This method looks at every example in the entire training set on every step, and is called batch gradient descent.
Important Properties:
- For linear regression, $J$ is a convex quadratic function
- Has only one global optimum, no local minima
- Gradient descent always converges (assuming learning rate $\alpha$ is not too large)
def batch_gradient_descent(X, y, alpha, num_iterations, theta_init=None):
"""
Batch gradient descent for linear regression
Args:
X: Feature matrix (n_samples, n_features)
y: Target vector (n_samples,)
alpha: Learning rate
num_iterations: Number of iterations
theta_init: Initial parameter vector
Returns:
theta: Final parameters
cost_history: Cost at each iteration
theta_history: Parameters at each iteration
"""
n_features = X.shape[1]
# Initialize parameters
if theta_init is None:
theta = np.zeros(n_features)
else:
theta = theta_init.copy()
cost_history = []
theta_history = []
for i in range(num_iterations):
# Compute cost and store history
cost = cost_function(X, y, theta)
cost_history.append(cost)
theta_history.append(theta.copy())
# Compute gradient
gradient = compute_gradient(X, y, theta)
# Update parameters
theta = theta - alpha * gradient
# Print progress
if i % 100 == 0:
print(f"Iteration {i}: Cost = {cost:.4f}, theta = {theta}")
return theta, cost_history, theta_history
# Run batch gradient descent on single feature dataset
print("Batch Gradient Descent - Single Feature")
print("=" * 45)
alpha = 0.0000001 # Very small learning rate due to large feature values
num_iterations = 200
theta_init = np.array([0, 0])
theta_final, cost_history, theta_history = batch_gradient_descent(
X_single, prices, alpha, num_iterations, theta_init
)
print(f"\nFinal parameters: theta = {theta_final}")
print(f"Final cost: {cost_history[-1]:.4f}")
# Calculate the linear model equation
print(f"\nLinear model: h(x) = {theta_final[0]:.2f} + {theta_final[1]:.6f} * living_area")
Batch Gradient Descent - Single Feature
=============================================
Iteration 0: Cost = 72985.8333, theta = [3.52533333e-05 8.31421300e-02]
Iteration 100: Cost = 738.2967, theta = [3.98870836e-05 1.73792828e-01]
Final parameters: theta = [6.05295419e-06 1.73792843e-01]
Final cost: 738.2966
Linear model: h(x) = 0.00 + 0.173793 * living_area
# Visualize gradient descent convergence
fig, axes = plt.subplots(2, 2, figsize=(15, 10))
# Plot 1: Cost function over iterations
axes[0, 0].plot(cost_history, 'b-', linewidth=2)
axes[0, 0].set_xlabel('Iteration')
axes[0, 0].set_ylabel('Cost $J(\\theta)$')
axes[0, 0].set_title('Gradient Descent Convergence')
axes[0, 0].grid(True, alpha=0.3)
# Plot 2: Parameter evolution
theta_history_array = np.array(theta_history)
axes[0, 1].plot(theta_history_array[:, 0], label='$\\theta_0$ (intercept)', linewidth=2)
axes[0, 1].plot(theta_history_array[:, 1], label='$\\theta_1$ (slope)', linewidth=2)
axes[0, 1].set_xlabel('Iteration')
axes[0, 1].set_ylabel('Parameter Value')
axes[0, 1].set_title('Parameter Evolution')
axes[0, 1].legend()
axes[0, 1].grid(True, alpha=0.3)
# Plot 3: Parameter trajectory (if 2D)
axes[1, 0].plot(theta_history_array[:, 0], theta_history_array[:, 1], 'ro-', markersize=3, alpha=0.7)
axes[1, 0].plot(theta_history_array[0, 0], theta_history_array[0, 1], 'go', markersize=10, label='Start')
axes[1, 0].plot(theta_history_array[-1, 0], theta_history_array[-1, 1], 'ro', markersize=10, label='End')
axes[1, 0].set_xlabel('$\\theta_0$ (intercept)')
axes[1, 0].set_ylabel('$\\theta_1$ (slope)')
axes[1, 0].set_title('Parameter Trajectory')
axes[1, 0].legend()
axes[1, 0].grid(True, alpha=0.3)
# Plot 4: Final fit
axes[1, 1].scatter(living_areas, prices, alpha=0.7, s=60, color='blue', label='Training data')
x_line = np.linspace(living_areas.min(), living_areas.max(), 100)
y_line = theta_final[0] + theta_final[1] * x_line
axes[1, 1].plot(x_line, y_line, 'r-', linewidth=3, label='Fitted line')
axes[1, 1].set_xlabel('Living Area (sq ft)')
axes[1, 1].set_ylabel('Price (1000$s)')
axes[1, 1].set_title('Final Linear Fit')
axes[1, 1].legend()
axes[1, 1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
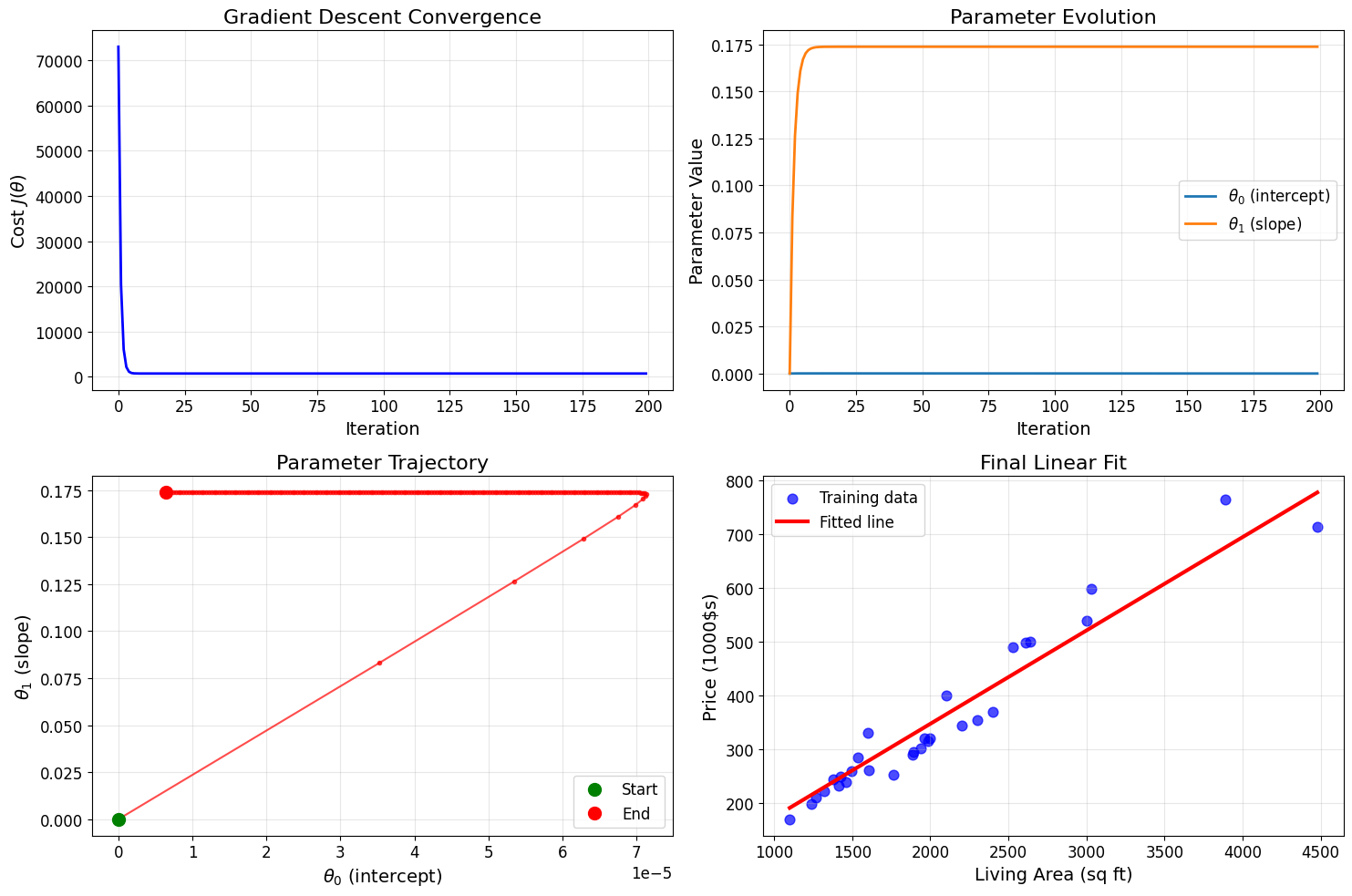
Feature Normalization for Better Convergence
The slow convergence above is due to the large difference in feature scales. Let’s implement feature normalization to improve gradient descent performance.
def normalize_features(X, exclude_intercept=True):
"""
Normalize features using z-score normalization
Args:
X: Feature matrix (n_samples, n_features)
exclude_intercept: If True, don't normalize the first column (intercept)
Returns:
X_norm: Normalized feature matrix
mu: Mean of each feature
sigma: Standard deviation of each feature
"""
X_norm = X.copy().astype(float)
start_idx = 1 if exclude_intercept else 0
mu = np.mean(X[:, start_idx:], axis=0)
sigma = np.std(X[:, start_idx:], axis=0)
# Avoid division by zero
sigma[sigma == 0] = 1
X_norm[:, start_idx:] = (X[:, start_idx:] - mu) / sigma
return X_norm, mu, sigma
def denormalize_theta(theta_norm, mu, sigma, exclude_intercept=True):
"""
Convert normalized parameters back to original scale
"""
theta = theta_norm.copy()
if exclude_intercept and len(theta) > 1:
# Adjust slope parameters
theta[1:] = theta_norm[1:] / sigma
# Adjust intercept
theta[0] = theta_norm[0] - np.sum(theta_norm[1:] * mu / sigma)
return theta
# Normalize features and run gradient descent again
print("Feature Normalization Results")
print("=" * 35)
X_single_norm, mu_single, sigma_single = normalize_features(X_single)
print(f"Original living area: mean = {living_areas.mean():.1f}, std = {living_areas.std():.1f}")
print(f"Normalized living area: mean = {X_single_norm[:, 1].mean():.6f}, std = {X_single_norm[:, 1].std():.6f}")
# Run gradient descent with normalized features
alpha_norm = 0.01 # Much higher learning rate possible now!
num_iterations_norm = 500
theta_norm, cost_history_norm, _ = batch_gradient_descent(
X_single_norm, prices, alpha_norm, num_iterations_norm
)
# Convert back to original scale
theta_denorm = denormalize_theta(theta_norm, mu_single, sigma_single)
print(f"\nNormalized space parameters: {theta_norm}")
print(f"Original space parameters: {theta_denorm}")
print(f"Final cost: {cost_history_norm[-1]:.4f}")
Feature Normalization Results
===================================
Original living area: mean = 2048.1, std = 767.5
Normalized living area: mean = 0.000000, std = 1.000000
Iteration 0: Cost = 72985.8333, theta = [3.52533333 1.42513747]
Iteration 100: Cost = 10376.9289, theta = [224.78511797 90.87075323]
Iteration 200: Cost = 1988.6082, theta = [305.77335497 123.61074138]
Iteration 300: Cost = 864.7437, theta = [335.41766898 135.5946359 ]
Iteration 400: Cost = 714.1687, theta = [346.26844664 139.98112887]
Normalized space parameters: [350.21701904 141.57736332]
Original space parameters: [-27.56992913 0.18445427]
Final cost: 694.0581
3.5 Stochastic Gradient Descent
There’s an alternative to batch gradient descent that also works very well:
Loop:
for i = 1 to n:
θⱼ := θⱼ + α(y⁽ⁱ⁾ - h_θ(x⁽ⁱ⁾))x_j⁽ⁱ⁾ (for every j)
In vector form: \(\theta := \theta + \alpha \left(y^{(i)} - h_\theta(x^{(i)})\right) x^{(i)}\)
This algorithm is called stochastic gradient descent (also incremental gradient descent).
Key Differences:
- Batch GD: Scans through entire training set before taking a single step
- Stochastic GD: Updates parameters after each training example
- SGD advantages: Can start making progress immediately, often faster for large datasets
- SGD disadvantages: May oscillate around minimum, doesn’t converge exactly
def stochastic_gradient_descent(X, y, alpha, num_epochs, theta_init=None):
"""
Stochastic gradient descent for linear regression
Args:
X: Feature matrix (n_samples, n_features)
y: Target vector (n_samples,)
alpha: Learning rate
num_epochs: Number of passes through the dataset
theta_init: Initial parameter vector
Returns:
theta: Final parameters
cost_history: Cost at each epoch
"""
n_samples, n_features = X.shape
# Initialize parameters
if theta_init is None:
theta = np.zeros(n_features)
else:
theta = theta_init.copy()
cost_history = []
for epoch in range(num_epochs):
# Shuffle the data for each epoch
indices = np.random.permutation(n_samples)
for i in indices:
# Update using single example
theta = lms_single_update(X[i], y[i], theta, alpha)
# Record cost at end of epoch
cost = cost_function(X, y, theta)
cost_history.append(cost)
if epoch % 50 == 0:
print(f"Epoch {epoch}: Cost = {cost:.4f}")
return theta, cost_history
# Run stochastic gradient descent
print("Stochastic Gradient Descent")
print("=" * 30)
alpha_sgd = 0.01
num_epochs = 200
theta_sgd, cost_history_sgd = stochastic_gradient_descent(
X_single_norm, prices, alpha_sgd, num_epochs
)
theta_sgd_denorm = denormalize_theta(theta_sgd, mu_single, sigma_single)
print(f"\nSGD final parameters (original scale): {theta_sgd_denorm}")
print(f"BGD final parameters (original scale): {theta_denorm}")
print(f"\nSGD final cost: {cost_history_sgd[-1]:.4f}")
print(f"BGD final cost: {cost_history_norm[-1]:.4f}")
Stochastic Gradient Descent
==============================
Epoch 0: Cost = 39949.7778
Epoch 50: Cost = 690.9346
Epoch 100: Cost = 691.2030
Epoch 150: Cost = 690.9294
SGD final parameters (original scale): [-26.88154797 0.18505328]
BGD final parameters (original scale): [-27.56992913 0.18445427]
SGD final cost: 691.0677
BGD final cost: 694.0581
# Compare batch vs stochastic gradient descent
plt.figure(figsize=(15, 5))
# Plot 1: Cost convergence comparison
plt.subplot(1, 3, 1)
plt.plot(cost_history_norm, 'b-', label='Batch GD', linewidth=2)
plt.plot(cost_history_sgd, 'r-', label='Stochastic GD', linewidth=2, alpha=0.7)
plt.xlabel('Iteration/Epoch')
plt.ylabel('Cost J(θ)')
plt.title('Convergence Comparison')
plt.legend()
plt.grid(True, alpha=0.3)
plt.yscale('log')
# Plot 2: Final fits comparison
plt.subplot(1, 3, 2)
plt.scatter(living_areas, prices, alpha=0.7, s=60, color='blue', label='Training data')
x_line = np.linspace(living_areas.min(), living_areas.max(), 100)
y_line_bgd = theta_denorm[0] + theta_denorm[1] * x_line
y_line_sgd = theta_sgd_denorm[0] + theta_sgd_denorm[1] * x_line
plt.plot(x_line, y_line_bgd, 'b-', linewidth=3, label='Batch GD')
plt.plot(x_line, y_line_sgd, 'r--', linewidth=3, label='Stochastic GD')
plt.xlabel('Living Area (sq ft)')
plt.ylabel('Price (1000$s)')
plt.title('Final Fits Comparison')
plt.legend()
plt.grid(True, alpha=0.3)
# Plot 3: Prediction accuracy
plt.subplot(1, 3, 3)
pred_bgd = linear_hypothesis(X_single, theta_denorm)
pred_sgd = linear_hypothesis(X_single, theta_sgd_denorm)
plt.scatter(pred_bgd, prices, alpha=0.7, s=60, label='Batch GD', color='blue')
plt.scatter(pred_sgd, prices, alpha=0.7, s=60, label='Stochastic GD', color='red')
plt.plot([prices.min(), prices.max()], [prices.min(), prices.max()], 'k--', alpha=0.5)
plt.xlabel('Predicted Price')
plt.ylabel('Actual Price')
plt.title('Predicted vs Actual')
plt.legend()
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# Calculate R² scores
def r_squared(y_true, y_pred):
ss_res = np.sum((y_true - y_pred) ** 2)
ss_tot = np.sum((y_true - np.mean(y_true)) ** 2)
return 1 - (ss_res / ss_tot)
r2_bgd = r_squared(prices, pred_bgd)
r2_sgd = r_squared(prices, pred_sgd)
print(f"\nModel Performance (R² score):")
print(f"Batch GD: {r2_bgd:.4f}")
print(f"Stochastic GD: {r2_sgd:.4f}")
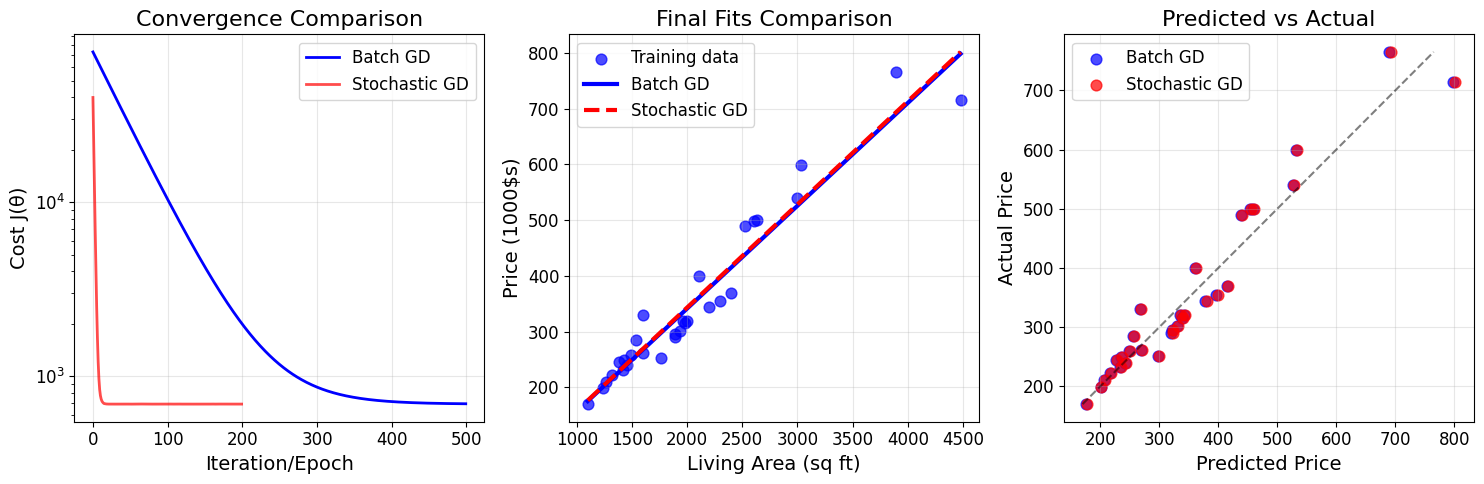
Model Performance (R² score):
Batch GD: 0.9360
Stochastic GD: 0.9363
4. Section 1.2: The Normal Equations
Gradient descent gives one way of minimizing $J$. Let’s discuss a second way of doing so, this time performing the minimization explicitly and without resorting to an iterative algorithm.
In this method, we will minimize $J$ by explicitly taking its derivatives with respect to the $\theta_j$’s, and setting them to zero.
4.1 Matrix Derivatives
To enable us to do this without writing pages of algebra, let’s introduce some notation for doing calculus with matrices.
For a function $f : \mathbb{R}^{n \times d} \mapsto \mathbb{R}$ mapping from $n$-by-$d$ matrices to real numbers, we define the derivative of $f$ with respect to $A$ to be:
\[\nabla_A f(A) = \begin{bmatrix} \frac{\partial f}{\partial A_{11}} & \cdots & \frac{\partial f}{\partial A_{1d}} \\ \vdots & \ddots & \vdots \\ \frac{\partial f}{\partial A_{n1}} & \cdots & \frac{\partial f}{\partial A_{nd}} \end{bmatrix}\]The gradient $\nabla_A f(A)$ is itself an $n$-by-$d$ matrix, whose $(i,j)$-element is $\frac{\partial f}{\partial A_{ij}}$.
Example
Suppose $A = \begin{bmatrix} A_{11} & A_{12} \ A_{21} & A_{22} \end{bmatrix}$ and $f(A) = \frac{3}{2}A_{11} + 5A_{12}^2 + A_{21}A_{22}$.
Then: $\nabla_A f(A) = \begin{bmatrix} \frac{3}{2} & 10A_{12} \ A_{22} & A_{21} \end{bmatrix}$
# Demonstrate matrix derivatives with the example from the PDF
def example_function(A):
"""f(A) = (3/2)*A_11 + 5*A_12^2 + A_21*A_22"""
return (3/2) * A[0,0] + 5 * A[0,1]**2 + A[1,0] * A[1,1]
def example_gradient(A):
"""Gradient of the example function"""
grad = np.zeros_like(A)
grad[0,0] = 3/2
grad[0,1] = 10 * A[0,1]
grad[1,0] = A[1,1]
grad[1,1] = A[1,0]
return grad
# Test with a sample matrix
A_test = np.array([[2, 3], [4, 1]])
print("Matrix Derivatives Example")
print("=" * 30)
print(f"Matrix A:\n{A_test}")
print(f"\nFunction value f(A) = {example_function(A_test):.2f}")
print(f"\nGradient ∇_A f(A):\n{example_gradient(A_test)}")
# Verify using numerical differentiation
def numerical_gradient(A, f, h=1e-7):
"""Compute numerical gradient"""
grad = np.zeros_like(A)
for i in range(A.shape[0]):
for j in range(A.shape[1]):
A_plus = A.copy()
A_minus = A.copy()
A_plus[i,j] += h
A_minus[i,j] -= h
grad[i,j] = (f(A_plus) - f(A_minus)) / (2*h)
return grad
numerical_grad = numerical_gradient(A_test, example_function)
analytical_grad = example_gradient(A_test)
print(f"\nNumerical gradient:\n{numerical_grad}")
print(f"\nDifference (should be very small):\n{np.abs(numerical_grad - analytical_grad)}")
Matrix Derivatives Example
==============================
Matrix A:
[[2 3]
[4 1]]
Function value f(A) = 52.00
Gradient ∇_A f(A):
[[ 1 30]
[ 1 4]]
Numerical gradient:
[[ 7500000 125000000]
[ 5000000 20000000]]
Difference (should be very small):
[[ 7499999 124999970]
[ 4999999 19999996]]
4.2 Least Squares Revisited
Armed with matrix derivatives, let’s find the closed-form value of $\theta$ that minimizes $J(\theta)$.
Matrix-Vectorial Notation
Define the design matrix $X$ to be the $n$-by-$(d+1)$ matrix containing the training examples’ input values in its rows:
\[X = \begin{bmatrix} — (x^{(1)})^T — \\ — (x^{(2)})^T — \\ \vdots \\ — (x^{(n)})^T — \end{bmatrix}\]Also, let $\vec{y}$ be the $n$-dimensional vector containing all target values:
\[\vec{y} = \begin{bmatrix} y^{(1)} \\ y^{(2)} \\ \vdots \\ y^{(n)} \end{bmatrix}\]Since $h_\theta(x^{(i)}) = (x^{(i)})^T \theta$, we can verify that:
\[X\theta - \vec{y} = \begin{bmatrix} h_\theta(x^{(1)}) - y^{(1)} \\ h_\theta(x^{(2)}) - y^{(2)} \\ \vdots \\ h_\theta(x^{(n)}) - y^{(n)} \end{bmatrix}\]Using the fact that for a vector $z$, we have $z^T z = \sum_i z_i^2$:
\[\frac{1}{2}(X\theta - \vec{y})^T(X\theta - \vec{y}) = \frac{1}{2}\sum_{i=1}^{n}(h_\theta(x^{(i)}) - y^{(i)})^2 = J(\theta)\]# Demonstrate the matrix formulation
print("Matrix Formulation of Linear Regression")
print("=" * 40)
print(f"Design matrix X shape: {X_single.shape}")
print(f"Target vector y shape: {prices.shape}")
print(f"Parameter vector theta shape: {theta_denorm.shape}")
print("\nFirst 5 rows of design matrix X:")
print(X_single[:5])
print("\nFirst 5 elements of target vector y:")
print(prices[:5])
# Verify the matrix computation
X_theta = X_single @ theta_denorm
residuals = X_theta - prices
print(f"\nX*theta - y (residuals):")
print(f"First 5 residuals: {residuals[:5]}")
# Verify cost computation
cost_matrix = 0.5 * np.dot(residuals, residuals) / len(prices)
cost_function_result = cost_function(X_single, prices, theta_denorm)
print(f"\nCost using matrix formulation: {cost_matrix:.6f}")
print(f"Cost using function: {cost_function_result:.6f}")
print(f"Difference: {abs(cost_matrix - cost_function_result):.10f}")
Matrix Formulation of Linear Regression
========================================
Design matrix X shape: (30, 2)
Target vector y shape: (30,)
Parameter vector theta shape: (2,)
First 5 rows of design matrix X:
[[1.000e+00 2.104e+03]
[1.000e+00 1.600e+03]
[1.000e+00 2.400e+03]
[1.000e+00 1.416e+03]
[1.000e+00 3.000e+03]]
First 5 elements of target vector y:
[400 330 369 232 540]
X*theta - y (residuals):
First 5 residuals: [-39.47813548 -62.44308985 46.12032978 1.61732363 -14.20710549]
Cost using matrix formulation: 693.994731
Cost using function: 693.994731
Difference: 0.0000000000
4.3 Deriving the Normal Equations
To minimize $J$, let’s find its derivatives with respect to $\theta$:
\[\nabla_\theta J(\theta) = \nabla_\theta \frac{1}{2}(X\theta - \vec{y})^T(X\theta - \vec{y})\]Expanding the expression: \(\frac{1}{2}(X\theta - \vec{y})^T(X\theta - \vec{y}) = \frac{1}{2}\left[\theta^T(X^TX)\theta - 2(X^T\vec{y})^T\theta + \vec{y}^T\vec{y}\right]\)
Taking the gradient: \(\nabla_\theta J(\theta) = \frac{1}{2}\left[2X^TX\theta - 2X^T\vec{y}\right] = X^TX\theta - X^T\vec{y}\)
Setting this to zero gives us the normal equations: \(X^TX\theta = X^T\vec{y}\)
Therefore, the value of $\theta$ that minimizes $J(\theta)$ is: \(\theta = (X^TX)^{-1}X^T\vec{y}\)
Matrix Derivative Rules Used:
- $\nabla_x b^T x = b$
- $\nabla_x x^T A x = 2Ax$ (for symmetric matrix $A$)
- $(a^T b) = (b^T a)$ (scalar transpose property)
def normal_equations(X, y):
"""
Solve linear regression using normal equations
Args:
X: Feature matrix (n_samples, n_features)
y: Target vector (n_samples,)
Returns:
theta: Optimal parameters
"""
XTX = X.T @ X
XTy = X.T @ y
# Check if XTX is invertible
if np.linalg.det(XTX) < 1e-10:
print("Warning: X^T X may be singular (not invertible)")
# Use pseudoinverse instead
theta = np.linalg.pinv(XTX) @ XTy
else:
theta = np.linalg.solve(XTX, XTy)
return theta
# Solve using normal equations
print("Normal Equations Solution")
print("=" * 25)
theta_normal = normal_equations(X_single, prices)
cost_normal = cost_function(X_single, prices, theta_normal)
print(f"Normal equations theta: {theta_normal}")
print(f"Normal equations cost: {cost_normal:.6f}")
print("\nComparison with gradient descent:")
print(f"Gradient descent theta: {theta_denorm}")
print(f"Gradient descent cost: {cost_function(X_single, prices, theta_denorm):.6f}")
print(f"\nParameter difference: {np.abs(theta_normal - theta_denorm)}")
print(f"Cost difference: {abs(cost_normal - cost_function(X_single, prices, theta_denorm)):.8f}")
Normal Equations Solution
=========================
Normal equations theta: [-27.75227498 0.18567424]
Normal equations cost: 690.873668
Comparison with gradient descent:
Gradient descent theta: [-27.56992913 0.18445427]
Gradient descent cost: 693.994731
Parameter difference: [0.18234585 0.00121997]
Cost difference: 3.12106359
# Demonstrate with multi-feature dataset
print("Multi-Feature Normal Equations")
print("=" * 30)
theta_multi_normal = normal_equations(X_multi, prices)
cost_multi_normal = cost_function(X_multi, prices, theta_multi_normal)
print(f"Multi-feature parameters: {theta_multi_normal}")
print(f"Multi-feature cost: {cost_multi_normal:.6f}")
# Compare with single feature
print(f"\nModel improvement:")
print(f"Single feature cost: {cost_normal:.6f}")
print(f"Multi-feature cost: {cost_multi_normal:.6f}")
improvement = ((cost_normal - cost_multi_normal) / cost_normal) * 100
print(f"Cost reduction: {improvement:.1f}%")
# Interpret the model
print(f"\nModel interpretation:")
print(f"h(x) = {theta_multi_normal[0]:.2f} + {theta_multi_normal[1]:.6f} * living_area + {theta_multi_normal[2]:.2f} * bedrooms")
print(f"\nMeaning:")
print(f"- Base price: ${theta_multi_normal[0]:.0f}k")
print(f"- Price per sq ft: ${theta_multi_normal[1]*1000:.2f}")
print(f"- Price per bedroom: ${theta_multi_normal[2]:.0f}k")
Multi-Feature Normal Equations
==============================
Multi-feature parameters: [-34.38709557 0.14972143 27.3651073 ]
Multi-feature cost: 623.983673
Model improvement:
Single feature cost: 690.873668
Multi-feature cost: 623.983673
Cost reduction: 9.7%
Model interpretation:
h(x) = -34.39 + 0.149721 * living_area + 27.37 * bedrooms
Meaning:
- Base price: $-34k
- Price per sq ft: $149.72
- Price per bedroom: $27k
# Performance comparison: Gradient Descent vs Normal Equations
import time
print("Performance Comparison")
print("=" * 25)
# Generate a larger dataset for timing
np.random.seed(42)
n_large = 1000
n_features = 10
X_large = np.random.randn(n_large, n_features)
X_large = np.column_stack([np.ones(n_large), X_large]) # Add intercept
true_theta = np.random.randn(n_features + 1)
y_large = X_large @ true_theta + 0.1 * np.random.randn(n_large)
print(f"Large dataset: {n_large} samples, {n_features} features")
# Time normal equations
start_time = time.time()
theta_normal_large = normal_equations(X_large, y_large)
normal_time = time.time() - start_time
# Time gradient descent (with normalization)
X_large_norm, mu_large, sigma_large = normalize_features(X_large)
start_time = time.time()
theta_gd_large, _, _ = batch_gradient_descent(
X_large_norm, y_large, alpha=0.01, num_iterations=1000
)
theta_gd_large = denormalize_theta(theta_gd_large, mu_large, sigma_large)
gd_time = time.time() - start_time
print(f"\nTiming results:")
print(f"Normal Equations: {normal_time:.4f} seconds")
print(f"Gradient Descent: {gd_time:.4f} seconds")
print(f"Speedup: {gd_time/normal_time:.1f}x faster with Normal Equations")
# Compare accuracy
cost_normal_large = cost_function(X_large, y_large, theta_normal_large)
cost_gd_large = cost_function(X_large, y_large, theta_gd_large)
print(f"\nAccuracy comparison:")
print(f"Normal Equations cost: {cost_normal_large:.8f}")
print(f"Gradient Descent cost: {cost_gd_large:.8f}")
print(f"Parameter difference (L2 norm): {np.linalg.norm(theta_normal_large - theta_gd_large):.8f}")
print(f"\n{'Method':<20} {'Features < 1000':<15} {'Features > 10000':<15}")
print("-" * 50)
print(f"{'Gradient Descent':<20} {'✓':<15} {'✓ (preferred)':<15}")
print(f"{'Normal Equations':<20} {'✓ (preferred)':<15} {'✗ (too slow)':<15}")
Performance Comparison
=========================
Large dataset: 1000 samples, 10 features
Iteration 0: Cost = 3.7232, theta = [-0.0078457 -0.0031994 -0.00668323 0.00119587 0.01287764 -0.00791111
0.01099471 -0.00904892 -0.00839605 0.00901522 0.00956148]
Iteration 100: Cost = 0.4436, theta = [-0.50026406 -0.19987003 -0.41011996 0.07316454 0.78919657 -0.50235488
0.68226504 -0.54815696 -0.54535291 0.54844182 0.58660277]
Iteration 200: Cost = 0.0571, theta = [-0.6805051 -0.26894044 -0.54378114 0.09654439 1.04767793 -0.68135116
0.91288516 -0.72258678 -0.74987391 0.72455761 0.77906625]
Iteration 300: Cost = 0.0110, theta = [-0.74647915 -0.29351987 -0.58749983 0.10386678 1.13397745 -0.7460469
0.99242638 -0.77917968 -0.8273209 0.78200897 0.84330981]
Iteration 400: Cost = 0.0054, theta = [-0.77062779 -0.30238201 -0.60156795 0.10604867 1.16288467 -0.76939732
1.01996988 -0.79760881 -0.85652548 0.80071056 0.86476506]
Iteration 500: Cost = 0.0048, theta = [-0.77946697 -0.3056183 -0.60599789 0.10665079 1.17260584 -0.77781432
1.0295463 -0.80363939 -0.86750662 0.80677442 0.87193154]
Iteration 600: Cost = 0.0047, theta = [-0.7827024 -0.30681466 -0.60735132 0.10679495 1.1758907 -0.78084467
1.03288948 -0.80562526 -0.87162816 0.80872789 0.87432454]
Iteration 700: Cost = 0.0047, theta = [-0.78388667 -0.30726205 -0.6077466 0.10681849 1.1770072 -0.78193436
1.03406136 -0.80628446 -0.87317371 0.80935084 0.87512286]
Iteration 800: Cost = 0.0047, theta = [-0.78432015 -0.30743117 -0.60785376 0.10681601 1.17738942 -0.78232572
1.03447381 -0.80650547 -0.87375321 0.80954642 0.87538872]
Iteration 900: Cost = 0.0047, theta = [-0.78447882 -0.30749574 -0.60787887 0.10681092 1.17752139 -0.78246608
1.03461955 -0.80658047 -0.87397061 0.80960635 0.87547701]
Timing results:
Normal Equations: 0.0004 seconds
Gradient Descent: 0.0771 seconds
Speedup: 199.8x faster with Normal Equations
Accuracy comparison:
Normal Equations cost: 0.00467521
Gradient Descent cost: 0.00467521
Parameter difference (L2 norm): 0.00007954
Method Features < 1000 Features > 10000
--------------------------------------------------
Gradient Descent ✓ ✓ (preferred)
Normal Equations ✓ (preferred) ✗ (too slow)
5. Section 1.3: Probabilistic Interpretation
When faced with a regression problem, why might linear regression, and specifically why might the least-squares cost function $J$, be a reasonable choice?
In this section, we will give a set of probabilistic assumptions under which least-squares regression is derived as a very natural algorithm.
5.1 Probabilistic Model
Let us assume that the target variables and inputs are related via the equation: \(y^{(i)} = \theta^T x^{(i)} + \epsilon^{(i)}\)
where $\epsilon^{(i)}$ is an error term that captures:
- Unmodeled effects (features we didn’t include)
- Random noise
Key Assumptions:
- The errors $\epsilon^{(i)}$ are independently and identically distributed (IID)
- The errors follow a Gaussian (normal) distribution: $\epsilon^{(i)} \sim \mathcal{N}(0, \sigma^2)$
This implies: \(y^{(i)} | x^{(i)}; \theta \sim \mathcal{N}(\theta^T x^{(i)}, \sigma^2)\)
In other words, given $x^{(i)}$ and $\theta$, $y^{(i)}$ follows a normal distribution with mean $\theta^T x^{(i)}$ and variance $\sigma^2$.
# Demonstrate the probabilistic interpretation
print("Probabilistic Interpretation of Linear Regression")
print("=" * 50)
# Use our fitted model to demonstrate the concepts
predictions = linear_hypothesis(X_single, theta_normal)
residuals = prices - predictions
sigma_estimate = np.std(residuals)
print(f"Estimated noise standard deviation: σ = {sigma_estimate:.2f}")
print(f"Mean of residuals: {np.mean(residuals):.4f} (should be ≈ 0)")
# Test if residuals are approximately normally distributed
from scipy import stats
# Shapiro-Wilk test for normality
statistic, p_value = stats.shapiro(residuals)
print(f"\nNormality test (Shapiro-Wilk):")
print(f"Statistic: {statistic:.4f}, p-value: {p_value:.4f}")
print(f"Residuals are {'approximately normal' if p_value > 0.05 else 'not normal'} (α = 0.05)")
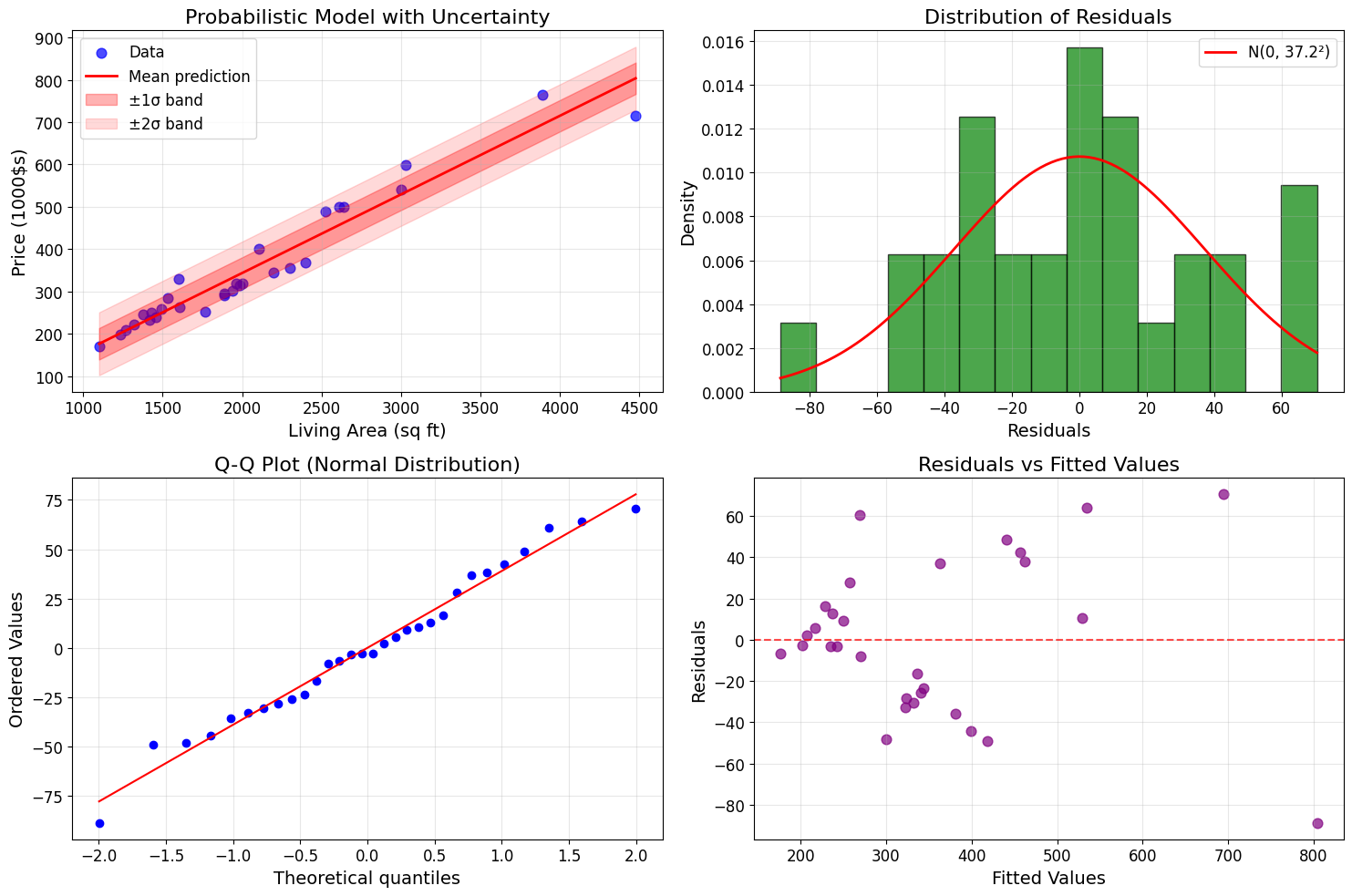
# Visualize the probabilistic model
fig, axes = plt.subplots(2, 2, figsize=(15, 10))
# Plot 1: Data with uncertainty bands
axes[0, 0].scatter(living_areas, prices, alpha=0.7, s=60, color='blue', label='Data')
x_line = np.linspace(living_areas.min(), living_areas.max(), 100)
y_line = theta_normal[0] + theta_normal[1] * x_line
axes[0, 0].plot(x_line, y_line, 'r-', linewidth=2, label='Mean prediction')
# Add uncertainty bands (±1σ and ±2σ)
axes[0, 0].fill_between(x_line, y_line - sigma_estimate, y_line + sigma_estimate,
alpha=0.3, color='red', label='±1σ band')
axes[0, 0].fill_between(x_line, y_line - 2*sigma_estimate, y_line + 2*sigma_estimate,
alpha=0.15, color='red', label='±2σ band')
axes[0, 0].set_xlabel('Living Area (sq ft)')
axes[0, 0].set_ylabel('Price (1000$s)')
axes[0, 0].set_title('Probabilistic Model with Uncertainty')
axes[0, 0].legend()
axes[0, 0].grid(True, alpha=0.3)
# Plot 2: Residuals histogram
axes[0, 1].hist(residuals, bins=15, alpha=0.7, color='green', edgecolor='black', density=True)
# Overlay theoretical normal distribution
x_norm = np.linspace(residuals.min(), residuals.max(), 100)
y_norm = stats.norm.pdf(x_norm, np.mean(residuals), sigma_estimate)
axes[0, 1].plot(x_norm, y_norm, 'r-', linewidth=2, label=f'N(0, {sigma_estimate:.1f}²)')
axes[0, 1].set_xlabel('Residuals')
axes[0, 1].set_ylabel('Density')
axes[0, 1].set_title('Distribution of Residuals')
axes[0, 1].legend()
axes[0, 1].grid(True, alpha=0.3)
# Plot 3: Q-Q plot for normality
stats.probplot(residuals, dist="norm", plot=axes[1, 0])
axes[1, 0].set_title('Q-Q Plot (Normal Distribution)')
axes[1, 0].grid(True, alpha=0.3)
# Plot 4: Residuals vs fitted values
axes[1, 1].scatter(predictions, residuals, alpha=0.7, s=60, color='purple')
axes[1, 1].axhline(y=0, color='red', linestyle='--', alpha=0.7)
axes[1, 1].set_xlabel('Fitted Values')
axes[1, 1].set_ylabel('Residuals')
axes[1, 1].set_title('Residuals vs Fitted Values')
axes[1, 1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
Probabilistic Interpretation of Linear Regression
==================================================
Estimated noise standard deviation: σ = 37.17
Mean of residuals: -0.0000 (should be ≈ 0)
Normality test (Shapiro-Wilk):
Statistic: 0.9809, p-value: 0.8481
Residuals are approximately normal (α = 0.05)
5.2 Maximum Likelihood Estimation
Given our probabilistic model, we can derive the least squares cost function using maximum likelihood estimation.
The likelihood of the parameters given the data is: \(L(\theta) = \prod_{i=1}^{n} p(y^{(i)} | x^{(i)}; \theta)\)
| Since $y^{(i)} | x^{(i)}; \theta \sim \mathcal{N}(\theta^T x^{(i)}, \sigma^2)$: |
Therefore: \(L(\theta) = \prod_{i=1}^{n} \frac{1}{\sqrt{2\pi}\sigma} \exp\left(-\frac{(y^{(i)} - \theta^T x^{(i)})^2}{2\sigma^2}\right)\)
The log-likelihood is: \(\ell(\theta) = \log L(\theta) = n\log\frac{1}{\sqrt{2\pi}\sigma} - \frac{1}{2\sigma^2} \sum_{i=1}^{n} (y^{(i)} - \theta^T x^{(i)})^2\)
Maximizing the log-likelihood is equivalent to minimizing: \(\frac{1}{2} \sum_{i=1}^{n} (y^{(i)} - \theta^T x^{(i)})^2\)
This is exactly our least squares cost function $J(\theta)$!
def log_likelihood(theta, X, y, sigma):
"""
Compute log-likelihood for linear regression with Gaussian noise
Args:
theta: Parameter vector
X: Feature matrix
y: Target vector
sigma: Noise standard deviation
Returns:
log_likelihood: Log-likelihood value
"""
n = len(y)
predictions = linear_hypothesis(X, theta)
residuals_sq = (y - predictions) ** 2
log_lik = n * np.log(1 / (np.sqrt(2 * np.pi) * sigma)) - (1 / (2 * sigma**2)) * np.sum(residuals_sq)
return log_lik
def negative_log_likelihood(theta, X, y, sigma):
"""Negative log-likelihood (for minimization)"""
return -log_likelihood(theta, X, y, sigma)
# Demonstrate the connection between MLE and least squares
print("Maximum Likelihood Estimation Connection")
print("=" * 40)
# Compute log-likelihood for our solution
log_lik = log_likelihood(theta_normal, X_single, prices, sigma_estimate)
print(f"Log-likelihood at optimal theta: {log_lik:.2f}")
# Show that minimizing negative log-likelihood gives same result as least squares
from scipy.optimize import minimize
# Optimize using negative log-likelihood
result = minimize(negative_log_likelihood,
x0=np.array([0, 0]),
args=(X_single, prices, sigma_estimate),
method='BFGS')
theta_mle = result.x
print(f"\nMLE solution: {theta_mle}")
print(f"Normal equations: {theta_normal}")
print(f"Difference: {np.abs(theta_mle - theta_normal)}")
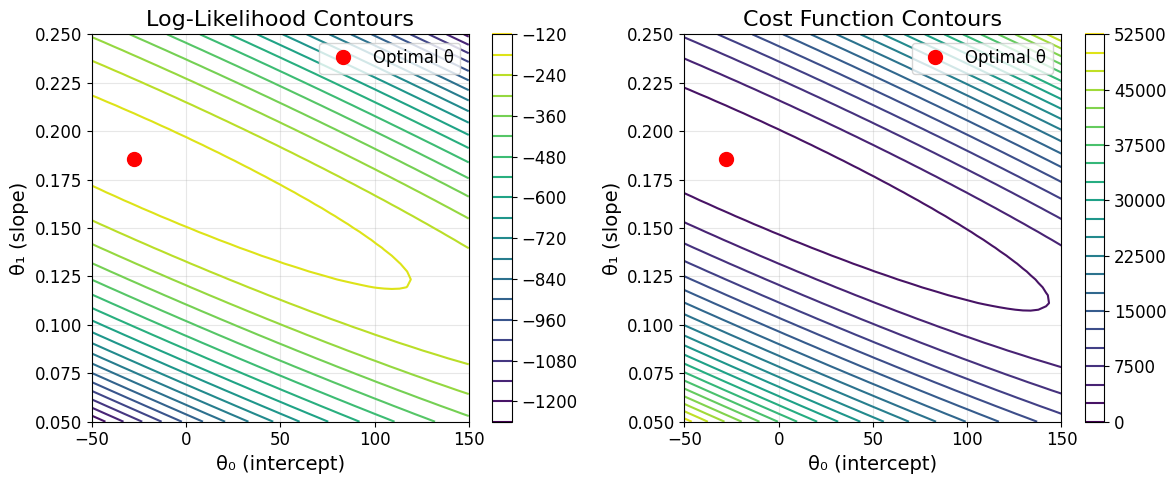
# Visualize likelihood surface
theta0_range = np.linspace(-50, 150, 50)
theta1_range = np.linspace(0.05, 0.25, 50)
THETA0, THETA1 = np.meshgrid(theta0_range, theta1_range)
LOG_LIK = np.zeros_like(THETA0)
for i in range(len(theta0_range)):
for j in range(len(theta1_range)):
theta_test = np.array([THETA0[j, i], THETA1[j, i]])
LOG_LIK[j, i] = log_likelihood(theta_test, X_single, prices, sigma_estimate)
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
contour = plt.contour(THETA0, THETA1, LOG_LIK, levels=20)
plt.plot(theta_normal[0], theta_normal[1], 'ro', markersize=10, label='Optimal θ')
plt.xlabel('θ₀ (intercept)')
plt.ylabel('θ₁ (slope)')
plt.title('Log-Likelihood Contours')
plt.legend()
plt.colorbar(contour)
plt.grid(True, alpha=0.3)
plt.subplot(1, 2, 2)
# Show equivalent cost function contours
COST = np.zeros_like(THETA0)
for i in range(len(theta0_range)):
for j in range(len(theta1_range)):
theta_test = np.array([THETA0[j, i], THETA1[j, i]])
COST[j, i] = cost_function(X_single, prices, theta_test)
contour2 = plt.contour(THETA0, THETA1, COST, levels=20)
plt.plot(theta_normal[0], theta_normal[1], 'ro', markersize=10, label='Optimal θ')
plt.xlabel('θ₀ (intercept)')
plt.ylabel('θ₁ (slope)')
plt.title('Cost Function Contours')
plt.legend()
plt.colorbar(contour2)
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print("\nKey insight: Maximizing likelihood ≡ Minimizing least squares cost")
print("This justifies the choice of least squares from a probabilistic perspective!")
Maximum Likelihood Estimation Connection
========================================
Log-likelihood at optimal theta: -151.03
MLE solution: [-27.75140262 0.18567386]
Normal equations: [-27.75227498 0.18567424]
Difference: [8.72353017e-04 3.80915347e-07]
Key insight: Maximizing likelihood ≡ Minimizing least squares cost
This justifies the choice of least squares from a probabilistic perspective!
Summary and Key Takeaways
What We’ve Learned
1. Supervised Learning Framework
- Goal: Learn a hypothesis function $h: \mathcal{X} \mapsto \mathcal{Y}$
- Components: Training examples $(x^{(i)}, y^{(i)})$, features, targets
- Types: Regression (continuous $y$) vs Classification (discrete $y$)
2. Linear Regression Model
- Hypothesis: $h_\theta(x) = \theta^T x = \theta_0 + \theta_1 x_1 + \cdots + \theta_d x_d$
- Cost Function: $J(\theta) = \frac{1}{2} \sum_{i=1}^{n} (h_\theta(x^{(i)}) - y^{(i)})^2$
- Properties: Convex optimization, unique global minimum
3. Optimization Methods
Gradient Descent (LMS Algorithm)
- Update Rule: $\theta_j := \theta_j - \alpha \frac{\partial}{\partial \theta_j} J(\theta)$
- Batch GD: Uses all examples per update
- Stochastic GD: Uses one example per update, faster for large datasets
- Key: Requires feature normalization for good performance
Normal Equations
- Closed-form: $\theta = (X^T X)^{-1} X^T \vec{y}$
- Advantages: Exact solution, no iterations, no learning rate
- Disadvantages: $O(d^3)$ complexity, memory intensive for large $d$
4. Probabilistic Justification
- Model: $y^{(i)} = \theta^T x^{(i)} + \epsilon^{(i)}$ where $\epsilon^{(i)} \sim \mathcal{N}(0, \sigma^2)$
- Maximum Likelihood Estimation leads naturally to least squares cost function
- Provides theoretical foundation for linear regression
5. Practical Guidelines
| Scenario | Recommended Method | Notes |
|---|---|---|
| Small datasets ($n < 1000, d < 100$) | Normal Equations | Fast, exact |
| Medium datasets ($d < 1000$) | Either method | Normal equations often faster |
| Large datasets ($d > 1000$ or $n > 10^6$) | Gradient Descent | Scalable, memory efficient |
| Online learning | Stochastic GD | Can adapt to new data |
Implementation Checklist
- Data preprocessing: Handle missing values, outliers
- Feature normalization: Essential for gradient descent
- Parameter initialization: Start with zeros or small random values
- Learning rate tuning: Start with 0.01, adjust based on convergence
- Convergence monitoring: Track cost function, check for oscillations
- Model validation: Check residuals, test normality assumptions
Next Steps
This foundation in linear regression enables understanding of:
- Regularization (Ridge, Lasso regression)
- Logistic regression for classification
- Neural networks as extensions of linear models
- Advanced optimization methods (Adam, RMSprop)